2021年6月10日,美国韦恩州立大学、同济大学林峰教授应邀做了题为《网络离散事件系统的建模与控制》的学术报告,报告以腾讯会议线上形式开展。
随着网络和通信技术的发展,许多工程系统呈现网络化特征,其中控制器和设备通过网络实现信息交换。在为这样的网络系统设计控制器时,网络延迟和丢包是不可忽视的。因此,网络化控制已成为系统与控制领域的一个重要研究方向。
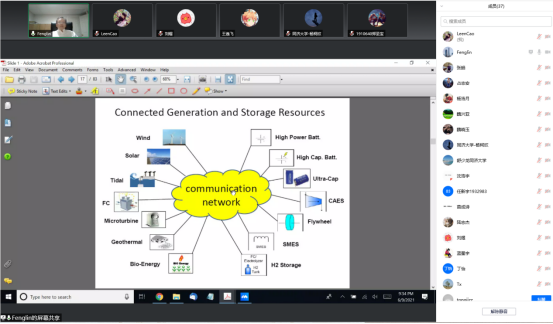
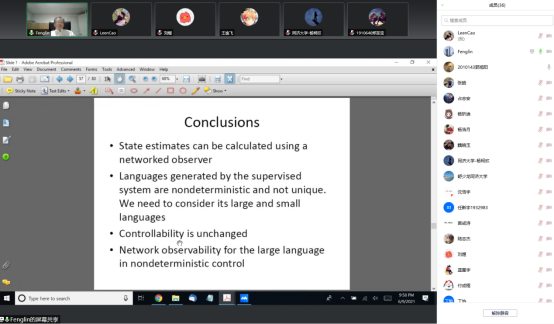
林峰教授主要研究的是离散事件系统在网络时延和丢包作用下的控制问题,即控制器和被控对象之间信息传输通道中存在网络时延和丢包,采用预测控制的方法,得到了网络化控制问题有解的充要条件,并且基于状态估计综合得到一个安全控制器,该控制器具有最优的控制性能,可保证闭环系统动态最大。他主要从网络离散事件系统的建模、状态估计、确定监督控制、阻塞监督控制、分布式监督控制方面分析了当前网络控制需要解决的问题及解决的方法。首先,他采用自动机模型构建上海地铁10号线部分路段的动态行为,简述了离散事件系统的建模思路。随后,他对网络时延和丢包特性进行分析,通过实例展示其对观测通道和控制通道产生的影响并建立不确定观测模型。最后,他简单分析了确定监督控制、阻塞监督控制与分布式监督控制充要条件的区别,并总结了本场报告内容。
实现网络化控制是我校学科发展和建设的重要目标,今后我校将继续与美国韦恩州立大学开展深入交流与合作。

